械設(shè)備有限公司")
平衡步驟
發(fā)布時(shí)間:
2024-07-03 17:37
1、平衡條件
(1) 明確轉(zhuǎn)子為剛性轉(zhuǎn)子
(2) 明確轉(zhuǎn)子存有不平衡故障不平衡屬于低頻故障, 當(dāng)5Hz~1KHz的通頻振動(dòng)(偏移峰峰值或速度有效值)較標(biāo)準(zhǔn)值有明顯擴(kuò)大時(shí), 表明機(jī)器有低頻類(lèi)故障在發(fā)展。 欲進(jìn)一步明確其是不是為不平衡故障,需開(kāi)展頻譜分析。不平衡故障表現(xiàn)在轉(zhuǎn)子徑向轉(zhuǎn)頻上的振幅擴(kuò)大,而在軸向和別的倍頻分量上振幅擴(kuò)大相對(duì)不明顯。 若軸向或別的倍頻分量上的振幅與徑向轉(zhuǎn)頻處的振幅一起明顯擴(kuò)大, 乃至擴(kuò)大速率超出徑向轉(zhuǎn)頻處的振動(dòng)幅值的擴(kuò)大速率,則應(yīng)考慮彎曲、不對(duì)中或松動(dòng)等別的故障。
2、平衡打算
(1) 明確轉(zhuǎn)子的平衡種類(lèi)和平衡方式依據(jù)轉(zhuǎn)子直徑與其長(zhǎng)度的關(guān)系明確其需做單面平衡或雙面平衡, 并決定應(yīng)用試重法或影響系數(shù)法對(duì)其進(jìn)行動(dòng)平衡。 若應(yīng)用影響系數(shù)法須事先從上位 PC機(jī)中下載該轉(zhuǎn)子的影響系數(shù),或記錄下該轉(zhuǎn)子的影響系數(shù),以便需用時(shí)手動(dòng)輸入。
(2) 選擇測(cè)點(diǎn)位置根據(jù)轉(zhuǎn)子的平衡類(lèi)型在該轉(zhuǎn)子設(shè)備上選擇相應(yīng)的測(cè)量平面和測(cè)點(diǎn)位置, 以便安置振動(dòng)傳感器。 測(cè)量平面應(yīng)選在轉(zhuǎn)子的軸承座或附近剛性較高、 較為平坦的金屬表面上。 測(cè)點(diǎn)應(yīng)布置在測(cè)量平面內(nèi)徑向振動(dòng)量最大位置或規(guī)定位置上,一般選擇轉(zhuǎn)子兩邊軸承座為測(cè)量平面, 測(cè)點(diǎn)以水平方向?yàn)楹谩?nbsp;單面平衡只需安置一個(gè)測(cè)點(diǎn),雙面平衡需安置兩個(gè)測(cè)點(diǎn)。測(cè)點(diǎn)位置需做上標(biāo)記,以便以后測(cè)量。
(3) 挑選校正面和加試重位置若應(yīng)用試重法, 充分考慮轉(zhuǎn)子的構(gòu)造特性, 挑選轉(zhuǎn)子上便捷安裝試探質(zhì)量和校正質(zhì)量的平面作為校正面。 以相同的標(biāo)準(zhǔn)在校正面上挑選以轉(zhuǎn)軸為圓心、 Rc為半徑的校正圓。 在校正圓上搞好試重位置標(biāo)識(shí)。 校正半徑應(yīng)盡可能大, 以提升角度定位精度,減少試探質(zhì)量。 單面平衡只需在1個(gè)平面內(nèi)進(jìn)行校正, 挑選1個(gè)試重位置即可。雙面平衡需要2個(gè)平面上進(jìn)行校正,應(yīng)以?xún)蓚€(gè)校正面中間的間距盡大,2個(gè)試重位置角度相距 0o。若應(yīng)用影響系數(shù)法, 則規(guī)定仍選用獲得該影響系數(shù)時(shí)的測(cè)量標(biāo)準(zhǔn):同樣的負(fù)載、轉(zhuǎn)速,同樣的振動(dòng)和轉(zhuǎn)速測(cè)量位置,同樣的反光條粘貼位置,且能辨認(rèn)出獲得該系數(shù)時(shí)的試重位置。故所述第( 2)、(3)步和以下第(6)步均可省略。
(4) 粘貼反光條在轉(zhuǎn)軸或轉(zhuǎn)子表層上, 沿與轉(zhuǎn)子軸線(xiàn)平行的方位粘貼反光條。 需確保反光條附近有必須的空間可安裝用于固定轉(zhuǎn)速傳感器的工具, 且反光條與轉(zhuǎn)軸柱面的反光性能有足夠的反差。
(5) 確定轉(zhuǎn)速傳感器轉(zhuǎn)速傳感器需安裝在磁性表座上隨后將表座吸咐在一剛性金屬表面, 使傳感器傳出的激光束切割反光條根據(jù)的位置上。 轉(zhuǎn)速傳感器安裝平穩(wěn)是否立即影響相位精密度。
(6) 挑選試探質(zhì)量試探質(zhì)量用于臨時(shí)更改一下轉(zhuǎn)子的質(zhì)量分布, 便于找到試探質(zhì)量與轉(zhuǎn)子振動(dòng)之間的關(guān)系。試探質(zhì)量過(guò)大,設(shè)備有將會(huì)達(dá)沒(méi)到設(shè)定轉(zhuǎn)速;試探質(zhì)量過(guò)小,則振動(dòng)變化不明顯, 使測(cè)量結(jié)果不精確。 留意積累經(jīng)驗(yàn)盡可能于恰當(dāng)挑選試探質(zhì)量。 單面平衡用一塊試探質(zhì)量即可。 雙面平衡可應(yīng)用二塊不一樣的試探質(zhì)量, 也可應(yīng)用同一塊試探質(zhì)量。試探質(zhì)量的挑選可參考以下公式:

式中: Mt------ 試探質(zhì)量, Kg
M------- 轉(zhuǎn)子質(zhì)量, Kg
n------- 平衡轉(zhuǎn)速, r/min
D 0------- 原始振幅, μm
r-------- 轉(zhuǎn)子半徑, m
3、單面試重法平衡流程弄完平衡準(zhǔn)備工作后,單面試重法平衡流程如下:
(1) 將振動(dòng)傳感器吸咐在選定的測(cè)點(diǎn)上, 轉(zhuǎn)速傳感器確定在正對(duì)反光條根據(jù)的位置上。
(2) 將振動(dòng)傳感器和轉(zhuǎn)速傳感器連接到動(dòng)平衡儀上,留意理順導(dǎo)線(xiàn),避免被絞進(jìn)轉(zhuǎn)子;開(kāi)啟動(dòng)平衡儀。
(3) 啟動(dòng)設(shè)備至設(shè)定轉(zhuǎn)速,平穩(wěn)后測(cè)定并儲(chǔ)存原始振動(dòng)烈度和相位。
(4) 停止設(shè)備,把選中的試探質(zhì)量安置在選定的試重部位上,并在儀器中輸入所加試重的質(zhì)量。
(5) 重啟設(shè)備,平穩(wěn)后測(cè)量并儲(chǔ)存加試重后的振動(dòng)烈度和相位。
(6) 用儀器開(kāi)展平衡結(jié)算獲得需要安置的校正質(zhì)量大小和位置角度。
(7) 停止設(shè)備轉(zhuǎn)動(dòng),去除試探質(zhì)量。將解計(jì)算的校正質(zhì)量安置在校正圓上校正角度選定的位置。 若因?yàn)檗D(zhuǎn)子構(gòu)造問(wèn)題, 此位置不能安置校正質(zhì)量, 則可執(zhí)行現(xiàn)場(chǎng)動(dòng)平衡儀的矢量分解功能。 將此校正質(zhì)量轉(zhuǎn)化成2個(gè)分量, 安置到2個(gè)便捷安置的部位上。 校正質(zhì)量的安置角度由試探質(zhì)量所在位置起沿轉(zhuǎn)子轉(zhuǎn)動(dòng)方向度量。若不愿去出試探質(zhì)量,還可以將其做為1個(gè)矢量分量(角度為零度),計(jì)算另外矢量分量, 使兩者合成結(jié)果等效于校正質(zhì)量, 隨后按計(jì)算的分量的大小和)3000n(4 ~ 8) r (2M D0M t角度安置在轉(zhuǎn)子上。
(8) 再一次啟動(dòng)設(shè)備,穩(wěn)定后測(cè)定并儲(chǔ)存剩下振動(dòng)烈度,將其與原始振動(dòng)烈度比較,檢查平衡效果怎樣及是不是符合規(guī)定。 若剩下振動(dòng)烈度仍過(guò)大, 則再次進(jìn)行平衡解算,算出第二次平衡要用的校正質(zhì)量尺寸和位置角度。
(9) 停止設(shè)備轉(zhuǎn)動(dòng),將第二次平衡解計(jì)算的校正質(zhì)量安置到校正面上。
(10) 再一次啟動(dòng)設(shè)備,平穩(wěn)后測(cè)定并儲(chǔ)存兩次平衡后的剩下振動(dòng)烈度。
(11) 關(guān)掉設(shè)備,將此次儲(chǔ)存的平衡數(shù)據(jù)發(fā)送至上位機(jī)中。
4、單面影響系數(shù)法平衡
做好平衡準(zhǔn)備工作后,單面影響系數(shù)法平衡流程如下:
(1) 檢查原轉(zhuǎn)速反光條是不是仍存有。若找不到,且原位置沒(méi)法分辨,則該影響系數(shù)失效,需改成試重法。若反光條反光性能降低,必須拆換反光條,且要確保與原位置相同。
(2) 將振動(dòng)傳感器吸附在舊的測(cè)量點(diǎn)標(biāo)識(shí)上, 轉(zhuǎn)速傳感器確定在正對(duì)反光條根據(jù)的位置上。
(3) 將振動(dòng)傳感器和轉(zhuǎn)速傳感器連接到動(dòng)平衡儀上, 注意理順導(dǎo)線(xiàn), 避免被絞進(jìn)轉(zhuǎn)子;啟用現(xiàn)場(chǎng)動(dòng)平衡儀。
(4) 啟動(dòng)設(shè)備至設(shè)置轉(zhuǎn)速,平穩(wěn)后測(cè)量并儲(chǔ)存原始振動(dòng)烈度和相位。
(5) 手動(dòng)輸入影響系數(shù)或應(yīng)用下載的影響系數(shù)開(kāi)展平衡解算, 獲得要用的校正質(zhì)量尺寸和位置角度。
(6) 停止設(shè)備旋轉(zhuǎn),將解計(jì)算的校正質(zhì)量安置在校正圓上校正角度特定的位置。若因?yàn)檗D(zhuǎn)子構(gòu)造問(wèn)題, 此位置不能安置校正質(zhì)量, 則可執(zhí)行現(xiàn)場(chǎng)動(dòng)平衡儀的矢量分解功能。將此校正質(zhì)量轉(zhuǎn)化成兩個(gè)分量,安置到2個(gè)便捷安置的部位上。校正質(zhì)量的安置角度由試探質(zhì)量所在位置起沿轉(zhuǎn)子旋轉(zhuǎn)方向度量。
(7) 再一次啟動(dòng)設(shè)備, 平穩(wěn)后測(cè)定并儲(chǔ)存剩下振動(dòng)烈度, 將其與原始振動(dòng)烈度比較,檢查平衡作用怎樣及是不是符合規(guī)定。 若剩下振動(dòng)烈度仍過(guò)大, 則再次開(kāi)展平衡解算,算出第二次平衡要用的校正質(zhì)量尺寸和位置角度。
(8) 停止設(shè)備旋轉(zhuǎn),將兩次平衡解計(jì)算的校正質(zhì)量安置到校正面上。
(9) 再一次啟動(dòng)設(shè)備,平穩(wěn)后測(cè)量并儲(chǔ)存兩次平衡后的剩余振動(dòng)烈度。
(10) 關(guān)掉設(shè)備,將此次儲(chǔ)存的平衡數(shù)據(jù)發(fā)送至上位機(jī)中。
5、雙面試重法平衡流程
雙面試重法平衡流程與單面試重法平衡相近, 可是務(wù)必在2個(gè)平面內(nèi)測(cè)量振動(dòng),并在2個(gè)平面上開(kāi)展校正。雙面試重法平衡流程如下(見(jiàn)圖 2-1):
(1) 將振動(dòng)傳感器吸咐在選定的測(cè)點(diǎn) A平面上。
(2) 轉(zhuǎn)速傳感器確定在正對(duì)反光條通過(guò)的部位上。
(3) 將振動(dòng)傳感器和轉(zhuǎn)速傳感器連接到動(dòng)平衡儀上,注意理順導(dǎo)線(xiàn),避免被絞進(jìn)轉(zhuǎn)子;開(kāi)啟現(xiàn)場(chǎng)動(dòng)平衡儀。
(4) 啟動(dòng)設(shè)備至設(shè)置轉(zhuǎn)速,平穩(wěn)后測(cè)量并儲(chǔ)存測(cè)量點(diǎn) A平面處的原始振動(dòng)烈度和相位。
(5) 將振動(dòng)傳感器移到選中的測(cè)點(diǎn) B平面處,平穩(wěn)后測(cè)定并儲(chǔ)存測(cè)點(diǎn) B平面處
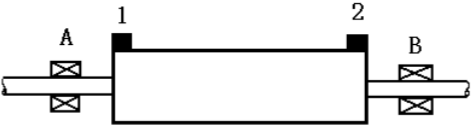
圖 2-1 雙面轉(zhuǎn)子平衡
的原始振動(dòng)烈度和相位。
(6) 停止設(shè)備旋轉(zhuǎn), 將選中的試探質(zhì)量 1安置在選定的校正平面 1內(nèi)的試重位置標(biāo)識(shí)處。在儀器中輸入所加試探質(zhì)量 1的質(zhì)量值。
(7) 將振動(dòng)傳感器移到測(cè)量點(diǎn) A平面處,重啟設(shè)備至設(shè)置轉(zhuǎn)速,平穩(wěn)后測(cè)定并儲(chǔ)存加試探質(zhì)量 1后測(cè)點(diǎn) A平面處的振動(dòng)烈度和相位。
(8) 將振動(dòng)傳感器移到測(cè)點(diǎn) B平面處,穩(wěn)定后測(cè)量并存儲(chǔ)加試探質(zhì)量 1后測(cè)點(diǎn)B平面處的振動(dòng)烈度和相位。
(9) 停止設(shè)備旋轉(zhuǎn), 去除校正平面 1內(nèi)的試探質(zhì)量 1。將選中的試探質(zhì)量 2(能夠依然應(yīng)用試探質(zhì)量 1)安置在選定的校正平面 2內(nèi)的試重位置標(biāo)識(shí)處。 在儀器中輸入所加試探質(zhì)量 2的質(zhì)量值。
(10) 將振動(dòng)傳感器移到測(cè)點(diǎn) A平面處,再一次啟動(dòng)設(shè)備至設(shè)置轉(zhuǎn)速,平穩(wěn)后測(cè)量并儲(chǔ)存加試探質(zhì)量 2后測(cè)點(diǎn) A平面處的振動(dòng)烈度和相位
(11) 將振動(dòng)傳感器移到測(cè)點(diǎn) B平面處,平穩(wěn)后測(cè)量并儲(chǔ)存加試探質(zhì)量 2后測(cè)點(diǎn)B平面處的振動(dòng)烈度和相位。
(12) 用儀器開(kāi)展平衡結(jié)算獲得需要安置的校正質(zhì)量 1的尺寸、角度和校正質(zhì)量2的尺寸、角度。
(13) 停止設(shè)備旋轉(zhuǎn),去除試探質(zhì)量 2。將解計(jì)算的校正質(zhì)量 1安置在校正面 1上,校正質(zhì)量 2安置在校正面 2上,每個(gè)校正質(zhì)量的安置半徑與其校正面上的試探
質(zhì)量安置半徑相同, 安置角度由其校正面上的試探質(zhì)量所在位置起沿轉(zhuǎn)子旋轉(zhuǎn)方向度量。在任意校正面上,若因?yàn)檗D(zhuǎn)子構(gòu)造問(wèn)題,此位置不能安置校正質(zhì)量,則可執(zhí)行現(xiàn)場(chǎng)動(dòng)平衡儀的矢量分解功能。將該校正面上的校正質(zhì)量轉(zhuǎn)化成2個(gè)分量,安置到2個(gè)便捷安置的部位上。
(14) 將振動(dòng)傳感器移到測(cè)點(diǎn) A平面處,重新啟動(dòng)設(shè)備,平穩(wěn)后測(cè)量并儲(chǔ)存測(cè)點(diǎn)A平面處的剩下振動(dòng)烈度和相位。
(15) 將振動(dòng)傳感器移到測(cè)點(diǎn) B平面處,平穩(wěn)后測(cè)量并儲(chǔ)存測(cè)點(diǎn) B平面處的剩下振動(dòng)烈度和相位。
(16) 將測(cè)點(diǎn) A、B平面處的剩下振動(dòng)烈度與原始振動(dòng)烈度比較,檢查平衡作用怎樣及是不是符合規(guī)定。 若剩下振動(dòng)烈度仍過(guò)大, 則繼續(xù)開(kāi)展平衡解算, 算出兩次平衡要用的校正質(zhì)量尺寸和位置角度。
(17) 停止設(shè)備轉(zhuǎn)動(dòng),將兩次平衡解計(jì)算的2個(gè)校正質(zhì)量各自安置到2個(gè)校正面上。
(18) 將振動(dòng)傳感器移到測(cè)量點(diǎn) A平面處,重新啟動(dòng)設(shè)備,平穩(wěn)后測(cè)量并儲(chǔ)存測(cè)點(diǎn)A平面處兩次平衡后的剩余振動(dòng)烈度和相位。
(19) 將振動(dòng)傳感器移到測(cè)點(diǎn) B平面處,穩(wěn)定后測(cè)量并存儲(chǔ)測(cè)點(diǎn) B平面處第二次平衡后的剩余振動(dòng)烈度和相位。
(20) 關(guān)閉機(jī)器,將本次存儲(chǔ)的平衡數(shù)據(jù)發(fā)送至上位機(jī)中。
6、雙面影響系數(shù)法平衡步驟雙面影響系數(shù)法平衡步驟如下:
(1) 檢查原轉(zhuǎn)速反光條是否仍存在。若不存在,且原位置無(wú)法辨認(rèn),則該影響系數(shù)失效,需改用試重法。若反光條反光性能下降,需要更換反光條,且要保證與原位置重合。
(2) 將振動(dòng)傳感器吸附在舊的測(cè)點(diǎn) A平面處,轉(zhuǎn)速傳感器固定在對(duì)著反光條通過(guò)的位置上。
(3) 將振動(dòng)傳感器和轉(zhuǎn)速傳感器連接到動(dòng)平衡儀上,注意理順導(dǎo)線(xiàn),防止被絞進(jìn)轉(zhuǎn)子;開(kāi)啟動(dòng)平衡儀。
(4) 啟動(dòng)機(jī)器至設(shè)定轉(zhuǎn)速,穩(wěn)定后測(cè)量并存儲(chǔ)測(cè)點(diǎn) A平面處的初始振動(dòng)烈度和相位。
(5) 將振動(dòng)傳感器移到舊的測(cè)點(diǎn) B平面處,穩(wěn)定后測(cè)量并存儲(chǔ)測(cè)點(diǎn) B平面處的振動(dòng)烈度和相位。
(6) 手動(dòng)輸入影響系數(shù)或使用下載的影響系數(shù)進(jìn)行平衡解算, 得出校正質(zhì)量1的大小、角度和校正質(zhì)量 2的大小、角度。
(7) 停止機(jī)器轉(zhuǎn)動(dòng),將平衡解算出的校正質(zhì)量 1安置在校正面 1上,校正質(zhì)量2安置在校正面 2上,每一校正質(zhì)量的安置半徑與其校正面上的試探質(zhì)量安置半徑相同,安置角度由其校正面上的試探質(zhì)量所在位置起沿轉(zhuǎn)子轉(zhuǎn)動(dòng)方向度量。 在任一校正面上, 若由于轉(zhuǎn)子結(jié)構(gòu)問(wèn)題, 此位置不可安置校正質(zhì)量, 則可執(zhí)行現(xiàn)場(chǎng)動(dòng)平衡儀的矢量分解功能。 將該校正面上的校正質(zhì)量分解成兩個(gè)分量, 安置到兩個(gè)方便安置的位置上。
(8) 將振動(dòng)傳感器移到測(cè)點(diǎn) A平面處,重新啟動(dòng)機(jī)器至設(shè)定轉(zhuǎn)速,穩(wěn)定后測(cè)量并存儲(chǔ)測(cè)點(diǎn) A平面處的剩余振動(dòng)烈度和相位。
(9) 將振動(dòng)傳感器移到測(cè)點(diǎn) B平面處,穩(wěn)定后測(cè)量并存儲(chǔ)測(cè)點(diǎn) B平面處的剩余振動(dòng)烈度和相位。
(10) 將測(cè)點(diǎn) A、B平面處的剩余振動(dòng)烈度與初始振動(dòng)烈度比較,檢查平衡效果如何及是否符合要求。 若剩余振動(dòng)烈度仍較大, 則繼續(xù)進(jìn)行平衡解算, 得出第二次平衡需用的校正質(zhì)量大小和位置角度。
(11) 停止機(jī)器轉(zhuǎn)動(dòng),將第二次平衡解算出的兩個(gè)校正質(zhì)量分別安置到兩個(gè)校正面上。
(12) 將振動(dòng)傳感器移到測(cè)點(diǎn) A平面處,重新啟動(dòng)機(jī)器,穩(wěn)定后測(cè)量并存儲(chǔ)測(cè)點(diǎn)A平面處第二次平衡后的剩余振動(dòng)烈度和相位。
(13) 將振動(dòng)傳感器移到測(cè)點(diǎn) B平面處,穩(wěn)定后測(cè)量并存儲(chǔ)測(cè)點(diǎn) B平面處第二次平衡后的剩余振動(dòng)烈度和相位。
(14) 關(guān)閉機(jī)器,將本次存儲(chǔ)的平衡數(shù)據(jù)發(fā)送至上位機(jī)中。
相關(guān)新聞
2024-07-03
平衡機(jī)發(fā)展迄今已經(jīng)有一百多年的歷史。1866年,德國(guó)西門(mén)子公司發(fā)明了發(fā)電機(jī)。4年后,加拿大人Henry Martinson申請(qǐng)了平衡技術(shù)的專(zhuān)li ,拉開(kāi)了平衡校正產(chǎn)業(yè)的序幕。
2024-07-03
電機(jī)轉(zhuǎn)子做動(dòng)平衡需注意的安全操作事宜
電機(jī)轉(zhuǎn)子裝配工的一般操作規(guī)程如下: 1、工作前,整理場(chǎng)地,放穩(wěn)各零、部件,并檢查裝配使用工具和工作環(huán)境是否安全良好。 2、吊放電機(jī)機(jī)座、底板、定子、轉(zhuǎn)子、軸承等大型部件時(shí)必須放好方箱或墊木...
2024-07-03
膠輥動(dòng)平衡機(jī)客戶(hù)現(xiàn)場(chǎng)
主要應(yīng)用于各類(lèi)家用電器、散熱風(fēng)扇、電機(jī)轉(zhuǎn)子、發(fā)電機(jī)轉(zhuǎn)子、水泵轉(zhuǎn)子、汽車(chē)、印刷、滾筒等行業(yè)高速旋轉(zhuǎn)工件的平衡校正。
2024-07-03
你還在用傳統(tǒng)平衡機(jī),看看卓玄金高新技術(shù)平衡機(jī)吧
廣州卓玄金機(jī)械設(shè)備有限公司-專(zhuān)業(yè)動(dòng)平衡機(jī)制造商 各類(lèi)平衡機(jī)為您量身定制 ?免費(fèi)上門(mén)安裝調(diào)試 長(zhǎng)年保修
2024-07-03
主要應(yīng)用于各類(lèi)家用電器、散熱風(fēng)扇、電機(jī)、發(fā)電機(jī)、水泵、汽車(chē)、印刷、滾筒等行業(yè)高速旋轉(zhuǎn)工件的平衡校正。
廣州卓玄金機(jī)械設(shè)備有限公司
傳真:020-36969822
地址:廣東省廣州市花都區(qū)大華大街34號(hào)(廣州卓玄金機(jī)械設(shè)備有限公司)
注我們")
關(guān)注我們
Copyright ? 2022 廣州卓玄金機(jī)械設(shè)備有限公司
械設(shè)備有限公司")
關(guān)鍵詞: 全自動(dòng)系列 智能定位系列 自驅(qū)動(dòng)整機(jī)系列 通用型系列