械設(shè)備有限公司")
現(xiàn)場動平衡校正方式
發(fā)布時(shí)間:
2024-07-03 17:37
現(xiàn)場動平衡機(jī)是指旋轉(zhuǎn)機(jī)械在現(xiàn)場工作或接近現(xiàn)場工作狀態(tài)下, 對其進(jìn)行振動測量分析和校正的一種平衡方法,特點(diǎn)是: 工作量小、快速等優(yōu)點(diǎn)。 現(xiàn)場動平衡調(diào)整只是對轉(zhuǎn)機(jī)的單面單測量校正,不能解決雙面力距不平衡量校正的問題。以下就簡述幾種現(xiàn)場動平衡的方法。
(一)、兩點(diǎn)法找動平衡:
包括水平兩點(diǎn)法,垂直兩點(diǎn)法。表述如下:
a、水平兩點(diǎn)法
測出風(fēng)機(jī)在工作轉(zhuǎn)速下兩軸承的振動振幅,若 A 側(cè)振動大(振動值為 Ao),則先平衡 A側(cè),在轉(zhuǎn)子上某一點(diǎn)(作記號 1)加上試加質(zhì)量 M,測得振動值為 A1,按相同半徑將此試加質(zhì)量 M移動 180°(作記號 2),測得振動值為 A2,根據(jù)測得的 A0、A1、A2 值,選適當(dāng)?shù)谋壤鲌D,求出應(yīng)加平衡質(zhì)量的位置和大小。作圖一所示:
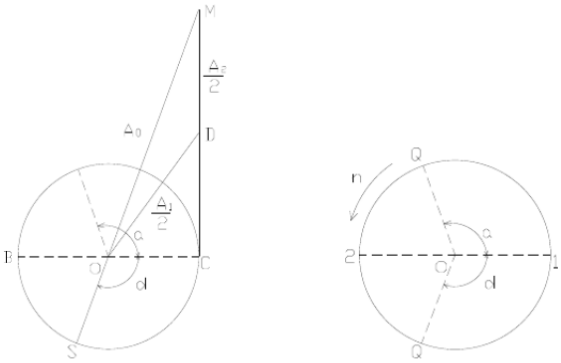
圖一 動平衡水平兩點(diǎn)法示意圖
作△ ODM,使 OM:OD:DM= A0:A1/2: A2/2,延長 MD至 C,使 CD=DM,并連接 OC;以 O為圓心, OC為半徑作圓 O;延長 CO與 O圓交于 B,延長 MO交圓于 S,則 OC為試加質(zhì)量 M引起的振動值(按比例放大后的振動值) ,平衡質(zhì)量 P 為:

永久配重的位置,由圖中量得角∠ COS為 d,則平衡質(zhì)量應(yīng)加在第一次試加質(zhì)量位置 1的逆轉(zhuǎn)向 α角或順轉(zhuǎn)向 d 角處, 具體方位由試驗(yàn)確定, 這種方法需要 5 次電機(jī)轉(zhuǎn)運(yùn), 才能完成找動平衡的工作。電機(jī)試運(yùn)次數(shù)較多。
b、垂直兩點(diǎn)法
測出風(fēng)機(jī)在工作轉(zhuǎn)速下兩軸承的振動振幅,若 A 側(cè)振動大(振動值為 Ao),則先平衡 A側(cè),在轉(zhuǎn)子上某一點(diǎn)(作記號 1)加上試加質(zhì)量 M,測得振動值為 A1,按相同半徑將此試加質(zhì)量 M移動 90°(作記號 2),測得振動值為 A2,根據(jù)測得的 A0、A1、A2 值,選適當(dāng)?shù)谋壤鲌D,求出應(yīng)加平衡質(zhì)量的位置和大小。作圖二所示:
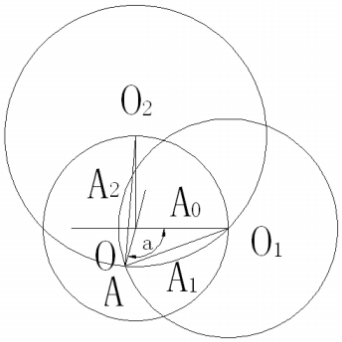
圖二 動平衡垂直兩點(diǎn)法示意圖
作圖時(shí),先以 A0 值為半徑,畫圖,圓心為 O,選擇水平半徑圓上 O1 (0 °) ,垂直半徑O2 (90 °) 。以 A1 為半徑,并以 O1為圓心畫圓,以 A2 為半徑,并以 O2為圓心畫圓。圓 O1和圓 O2在以 O為圓心, A0 為半徑的圓中只有唯一的一個(gè)交點(diǎn) A,分析 O?OA和 O?OA ,根據(jù)力學(xué)的一般知識, 可以知道矢量應(yīng)該是北側(cè)轉(zhuǎn)子在 0°和 90°加試重 M造成的振動變化。求出 OA大小及其與 O?O 和 O?O 的夾角,則配重的大小 P可表示為:
永久配重的位置,按 O1 (0 °) 計(jì),則要轉(zhuǎn)過 a 角使之反向;若按 O2 (90°) 計(jì),應(yīng)該轉(zhuǎn)過 a+90°。這個(gè)方法的優(yōu)勢就是一次確定配重位置,一共需要 4 次運(yùn)轉(zhuǎn)電機(jī)就可有效減小轉(zhuǎn)子振動。
(二)、三點(diǎn)法找動平衡
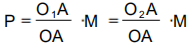
此法與兩點(diǎn)法基本相同, 只是用同一試加質(zhì)量 M按一定的半徑依次加在互為 120°的三個(gè)方向上,測得的三個(gè)振動值為 A1、A2、A3。
作圖步驟如下(具體作圖如圖三所示):
1、以O為圓心,取合適比列,以A1、A2、A3為半徑畫圓;
2、小圓內(nèi)以OA為邊長,OA為頂點(diǎn),做等邊三角形OAB;
3、以B為圓心,中圓的半徑為半徑畫圓,所得圓與大圓交于C點(diǎn)
4、以AC為邊,A和C為頂點(diǎn),做等邊三角形 ![]() ACD;
ACD;
5、做![]() ACD的中心點(diǎn),記為 S。以 S為圓心,AS為半徑做圓,OS與S圓交于S’點(diǎn)。
ACD的中心點(diǎn),記為 S。以 S為圓心,AS為半徑做圓,OS與S圓交于S’點(diǎn)。
S’即為平衡重量應(yīng)加的位置,A、C、D 三點(diǎn)分別對應(yīng)三個(gè)試加質(zhì)量的位置。這一方法電機(jī)試運(yùn)次數(shù)為 4 次。
平衡質(zhì)量 P 為:

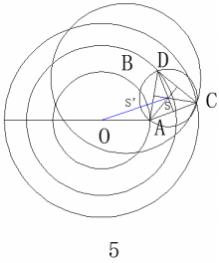
圖三 動平衡三點(diǎn)法示意圖
(三) 、閃光測相法找動平衡
其原理是引起轉(zhuǎn)子振動的干擾力就是不平衡質(zhì)量產(chǎn)生的離心力,通過儀器測出干擾力的最大振幅及相位變化,運(yùn)用向量計(jì)算可知不平衡質(zhì)量的大小和位置,在其相反位置上加上相等的質(zhì)量,就可抵消由于不平衡質(zhì)量而產(chǎn)生的振動。用閃光燈的閃光時(shí)間直接受振動相位的控制,當(dāng)轉(zhuǎn)速和閃光燈的閃光頻率同步時(shí),閃光燈每次閃光的時(shí)間正好是轉(zhuǎn)輪到同一位置的時(shí)候,閃光測相法步驟分為 9 步,數(shù)次試加平衡塊和啟動轉(zhuǎn)機(jī),測得振幅和相位,再進(jìn)行向量作圖運(yùn)算,以求出應(yīng)加平衡塊的質(zhì)量和位置。
在此可看出以上這些方法難以被檢修人員掌握和運(yùn)用的原因有:1)步驟多,耗時(shí)長,反復(fù)試加重塊;2)復(fù)雜,需作圖計(jì)算,并動用專用儀器。
(四 ) 、劃線法找動平衡
我們知道,不平衡的轉(zhuǎn)子在轉(zhuǎn)動時(shí)會產(chǎn)生離心力,此力周期性地沖擊著軸承產(chǎn)生振動,我們用測振表先測出軸承部位的振動值,掌握轉(zhuǎn)子工作狀態(tài)下的不平衡狀況,然后按如下步驟操作實(shí)施:
1、 在停止轉(zhuǎn)動的風(fēng)機(jī)軸上靠近葉輪部位選擇一段,擦凈其表面,檢查確定其圓度合乎標(biāo)準(zhǔn)。
2、 起動風(fēng)機(jī)至工作轉(zhuǎn)速,用磨尖的石筆在此軸段中心線的位置緩慢伸入,當(dāng)石筆剛接觸到軸表面時(shí)即停止前伸,而改變?yōu)檠剌S向推移一小段后收回,使軸段上留下石筆畫出的線段,如此重復(fù)畫數(shù)次直至畫完選定的軸段。動作一定要輕而穩(wěn),注意石筆不可伸得太前,否則軸上將會畫出整圈圓弧,前伸不足則筆和軸的接觸不夠,畫不上線段或畫出的線段不清楚,從而難以判斷,在畫線的同時(shí),可用振動表測出軸承振動值 Ao。
3、 待風(fēng)機(jī)停穩(wěn)后, 在軸上找出所畫線段的中心線 A-A,在軸的其他部位做好其位置標(biāo)記F,將 A-A 線轉(zhuǎn)至水平位置,該水平線的對稱位置經(jīng)葉輪回轉(zhuǎn)方向的反向之后一個(gè)相位角即為加重點(diǎn)。其滯后角如下表:

4、平衡配重則根據(jù)經(jīng)驗(yàn)數(shù)據(jù)選取, 將配重焊接于風(fēng)機(jī)前盤或者后盤邊緣非工作面。 再次啟動風(fēng)機(jī),用測振儀測量其振幅,如達(dá)到其要求則工作結(jié)束,如果振幅不符合要求,則需要重新找動平衡。
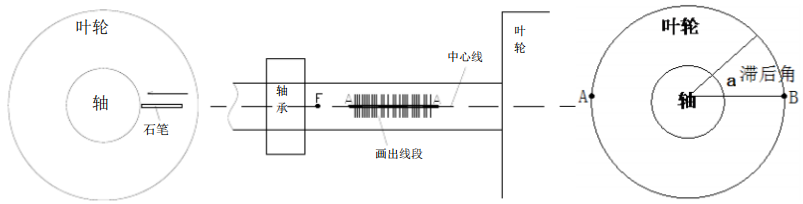
圖四 動平衡劃線法示意圖
相較其他方法而言, 一次劃線法操作簡單、工作時(shí)間短, 所需轉(zhuǎn)機(jī)試運(yùn) 2-3 次,其有極大地應(yīng)用優(yōu)勢。 但是,平衡配重和滯后角的選取要有一定的經(jīng)驗(yàn)性, 這需要一定是校正平衡工作積累。
相關(guān)新聞
2024-07-03
平衡機(jī)發(fā)展迄今已經(jīng)有一百多年的歷史。1866年,德國西門子公司發(fā)明了發(fā)電機(jī)。4年后,加拿大人Henry Martinson申請了平衡技術(shù)的專li ,拉開了平衡校正產(chǎn)業(yè)的序幕。
2024-07-03
電機(jī)轉(zhuǎn)子裝配工的一般操作規(guī)程如下: 1、工作前,整理場地,放穩(wěn)各零、部件,并檢查裝配使用工具和工作環(huán)境是否安全良好。 2、吊放電機(jī)機(jī)座、底板、定子、轉(zhuǎn)子、軸承等大型部件時(shí)必須放好方箱或墊木...
2024-07-03
主要應(yīng)用于各類家用電器、散熱風(fēng)扇、電機(jī)轉(zhuǎn)子、發(fā)電機(jī)轉(zhuǎn)子、水泵轉(zhuǎn)子、汽車、印刷、滾筒等行業(yè)高速旋轉(zhuǎn)工件的平衡校正。
2024-07-03
你還在用傳統(tǒng)平衡機(jī),看看卓玄金高新技術(shù)平衡機(jī)吧
廣州卓玄金機(jī)械設(shè)備有限公司-專業(yè)動平衡機(jī)制造商 各類平衡機(jī)為您量身定制 ?免費(fèi)上門安裝調(diào)試 長年保修
2024-07-03
主要應(yīng)用于各類家用電器、散熱風(fēng)扇、電機(jī)、發(fā)電機(jī)、水泵、汽車、印刷、滾筒等行業(yè)高速旋轉(zhuǎn)工件的平衡校正。
廣州卓玄金機(jī)械設(shè)備有限公司
傳真:020-36969822
地址:廣東省廣州市花都區(qū)大華大街34號(廣州卓玄金機(jī)械設(shè)備有限公司)
注我們")
關(guān)注我們
Copyright ? 2022 廣州卓玄金機(jī)械設(shè)備有限公司
械設(shè)備有限公司")
關(guān)鍵詞: 全自動系列 智能定位系列 自驅(qū)動整機(jī)系列 通用型系列